VARIABLE ANTI SQUAT TECHNOLOGY
The Term VAST was created to describe anti squat outcomes that are curved not linear
Compared to most existing systems* out there these systems provide a different response in the portion of travel above the sag point compared to below the sag point. The portion of travel above the sag point is consumed when you sit on the bike, and what happens in this part of the travel while riding is critical to bike performance, especially when pedaling over bumps.
Advantages:
These systems provide reduced anti squat (which can be below 100%) when the suspension is extended above the sag point:
- Pedaling forces do not “hold” or move the suspension up when it is already above the sag point.
- Reduced reactions to chain forces when the suspension is extended allow the suspension to remain active and settle to the sag point more easily.
- The lack of aggressive anti squat reactions above the sag point mean that is it easier to pedal over tricky obstacles like roots and rocks on uphill climbs.
The benefits of these outcomes are explained here.
The goal with these systems is to compliment the slightly lower anti squat above the sag point with a tuned higher anti squat (e.g. around 100% or slightly above) at and below the sag point. This provides for efficient pedaling and a firm feel under hard pedaling.
Test Proven Performance Benefits
Test results support the benefits of these systems when pedaling over obstacles and up hills. Go here to see the results of the original Z-Link system.
* Systems that can be tuned to have these feature include those used by Yeti, Santa Cruz and possibly Polygon. The DW6 system may also be able to be tuned for this behaviour.

EVOLUTION
Origins & Evolution
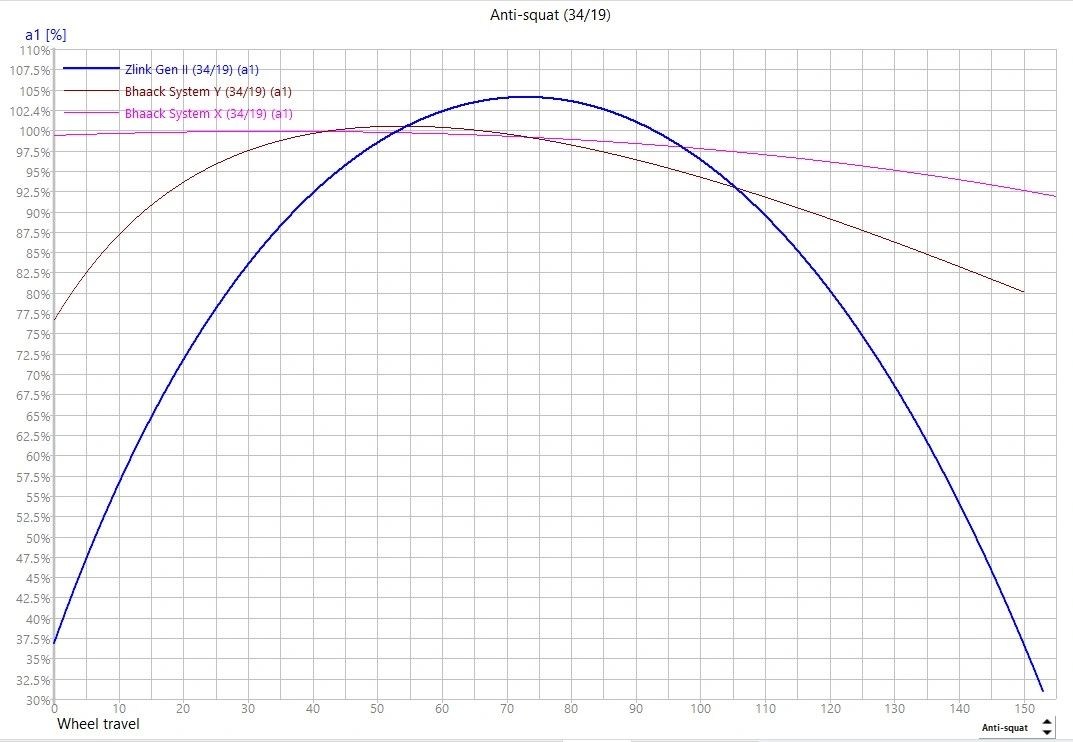
My first system was originally conceived around a simple concept. Reduce the anti squat above the sag point to focus the system dynamics towards the sag point.
The first generation of the Z-link system provided heavily large reductions in anti-squat above the sag point. The second generation of the Z-link system refined this outcome delivering a more stable anti-squat response across the travel range. See below